DYNAMIXEL Motor
Dynamixel智能馬達是模組化形式,採用菊鏈多串接方式。這讓用戶可以輕鬆地更改和添加馬達關節,以獲得所需的扭力和自由度。
DYNAMIXEL Motor 有的是使用TTL,有的是使用RS485的訊號來做控制
而XL430-W250 則是使用TTL訊號來做控制
控制器 <----------TTL-------------> DYNAMIXEL Motor (XL430-W250 )
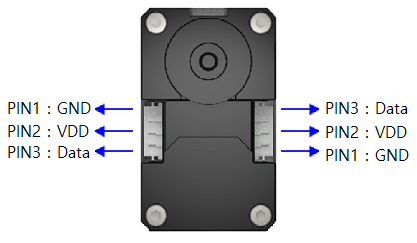
TTL 共有3個Pin
Data ---- 5V
VDD ---12V
GND
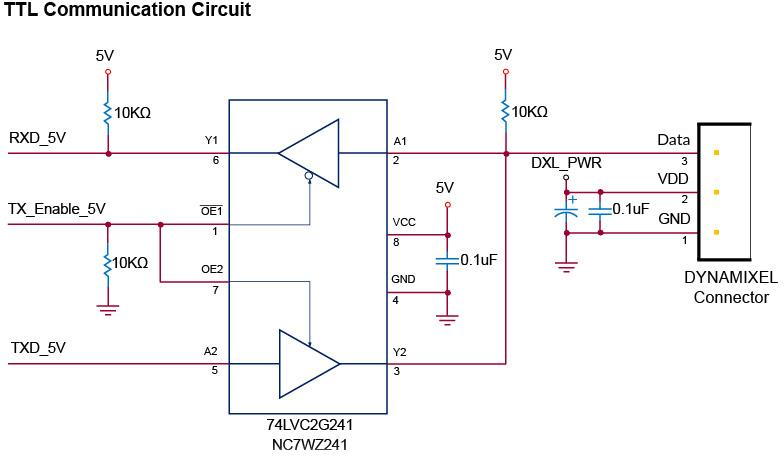
所謂TTL 訊號控制可以看成是UART的半雙工模式,即出去(TX)和進來(RX) 都是走同一個TTL 的Data訊號
UART TX -----------------------> TTL Data
UART RX <----------------------- TTL Data