1.) 安裝 jupyter notebook
sudo pip3 install jupyter
(約等個15分鐘吧..耐心等候)
2.) 讓 jupyter-notebook Server 可從windows連入
==> jupyter notebook --generate-config
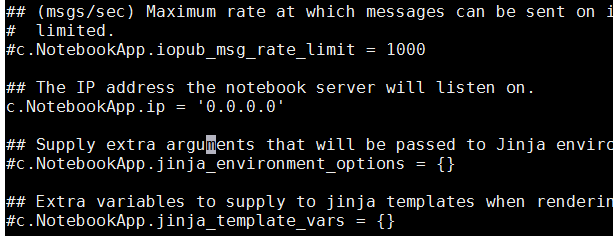
#修改 ~/.jupyter/jupyter_notebook_config.py 找到
#c.NotebookApp.ip = ‘localhost'
改成
c.NotebookApp.ip = '0.0.0.0’
# 設定瀏覽器登入 jupyter notebook server密碼
==> jupyter notebook password

4.) 在windows上,打開瀏覽器連入
http://192.168.1.252:8888/

(更多Pi 的基礎操作, 請看課程學習 )

成功登入 jupyter notebook畫面~


sudo pip3 install jupyter
(約等個15分鐘吧..耐心等候)
2.) 讓 jupyter-notebook Server 可從windows連入
==> jupyter notebook --generate-config
#修改 ~/.jupyter/jupyter_notebook_config.py 找到
#c.NotebookApp.ip = ‘localhost'
改成
c.NotebookApp.ip = '0.0.0.0’
==> jupyter notebook password
3.)啓動jupyter-notebook
sudo jupyter-notebook
如果是root ,則要多加 --allow-root 才能啓動 sudo jupyter-notebook --allow-root
sudo jupyter-notebook
如果是root ,則要多加 --allow-root 才能啓動 sudo jupyter-notebook --allow-root
4.) 在windows上,打開瀏覽器連入

Note: 192.168.1.252 為 Pi的Ethernet IP, 也可以用Wi-Fi 的IP連入, 只要那個IP是Windows能連到的即可 (同一個router所配的IP都OK!)
如何查Pi的IP? 請執行ifconfig ==> 查看Pi網路IP
(更多Pi 的基礎操作, 請看課程學習 )
成功登入 jupyter notebook畫面~

看一下 jupyter notebook kernel 使用的python 版本